domingo, 31 de agosto de 2014
Multicolinealidad y muestras pequeñas
sábado, 30 de agosto de 2014
Supuesto 11: Normalidad de u (II)
Quedan los supuestos 4,5,7,8,9 y 10. Los supuestos 7,8 y 10 están estrechamente interrelacionados y se analizan en el capítulo sobre multicolinealidad (capítulo 10). El supuesto 4 se estudia en el capítulo sobre htereoscedasticidad, (capítulo 11). El supuesto 5 se analiza en el capítulo sobre autocorrelación (capítulo 12). Finalmente, el supuesto 9 se analiza en el capítulo sobre especificación de modelos (capítulo 13) y se trabaja más en detalle en el capítulo 14.
Por razones pedagógicas, en cada uno de estos capítulos se sigue un esquema común , a saber , (1) identificar la naturaleza del problema, (2) examinar sus consecuencias, (3) sugerir métodos para detectarlo y (4) considerar medidas remediales de tal forma que puedan conducir a estimadores que posean las propiedades estadísticas deseables analizadas en la parte I.
Cabe anotar: Como se mencionó anteriormente, no existen respuestas satisfactorias a todos los problemas que surgen de la violación de los supuestos del MCRL. Además, puede haber más de una solución a un problema particular y frencuentemente no está claro cuál método es el mejor . Además, en una aplicación particular, puede estar involucrada más de una violación del MCRL. Así, el sesgo de especificación, la multicolinealidad y la hereoscedasticidad puede coexistir e una aplicación y no existe una prueba única opmnipotente que resuelva todos los problemas simultáneamente. Además, una prueba específica, corriente en alguna época, quizá ya no se aplique porque se descubrió que tenía algunas limitaciones. Pero esta es la forma como la ciencia progresa. La cronometraría no es la excepción.
viernes, 29 de agosto de 2014
Supuesto 11: Normalidad de u (I)
ESte supuesto no es esencial si el objetivo es solamente la estimación. Como se mencionó en el Capítulo 3, los estimadores MCO son MELI sin importar si las ui están normalmente distribuidas o no. Con el supuesto de normalidad, sin embargo, es posible establecer que los estimadores MCO de los coeficientes de regresión siguen la distribución normal, que (n-k)σ²/σ² sigue la distribución X² y que se podrían utilizar las pruebas t y F para verificar diversas hipótesis estadísticas sin importar el tamaño de la muestra.
Pero qué sucede si las ui no están normalmente distribuidas? Entonces se tiene en cuenta la siguiente extensión del teorema de límite central; recuérdese que fue el teorema de límite central, en primera instancia, el que se utilizó para justificar el supuesto de normalidad:
Si las perturbaciones [ui] son independientes e idénticamente distribuidas con media cero y varianza [constante] σ² y si las variables explicativas son constantes en muestras repetidas, los estimadores MC[O] de coeficientes son asintóticas normales con medias iguales a los β correspondientes.
Por consiguiente, los procedimientos de prueba usuales - las pruebas t y F- son aún válidas asintóticamente, es decir, en la muestra grande, pero no en muestras finitas o pequeñas.
Los estimadores MCO siguen una distribución normal asintóticamente (bajo el supuesto de varianza homoscedástica y X fijas) a pesar de que las perturbaciones no estén normalmente distribuidas. Este hecho es de poca ayuda a los economistas empíricos, quienes frecuentemente no disponen de información de grandes muestras. Por lo tanto, el supuesto de normalidad se hace extremadamente importante para los fines de prueba de hipótesis y predicción. Entonces, teniendo en mente los problemas de estimación y de prueba de hipótesis y dado el hecho de que las muestras pequeñas son la regla más que la excepción en la mayoría de los análisis económicos, se debe continuar utilizando el supuesto de normalidad.
jueves, 28 de agosto de 2014
Supuesto 3: Valor de la media de ui igual a cero.
Yi =β1 + β2X2i + β3X3i +.....+βkXki + ui (1)

Pero como se ha mencionado en diversas ocasiones, en muchas situaciones prácticas el término intercepto, β1, es de poca importancia; los parámetros con mayor significado son los coeficientes de pendiente, que permaneceran inalterados aún si el supuesto 3 es violado. Además, en muchas aplicaciones el término intercepto no tiene interpretación alguna.
miércoles, 27 de agosto de 2014
Supuestos 2 y 6: Regresores fijos Vs regresores estocásticos
Pero suponga que no podemos considerar las X como realmente no estocásticas o fijas. Este es el caso de los regresores aleatorios o estocásticos. Ahora la situación es más compleja. Las ui por supuesto, son estocásticas. Si las X tambien lo son, entonces se debe especificar la forma como están distribuidas tanto las X como las ui. Si estamos dispuestos a considerar el supuestos 6 ( es decir, las X aunque aleatorias, están distribuidas independientemente de, o por lo menos no están correlacionadas con, las ui), entonces para todo fin práctico se puede continuar operando como si las X fueran no estocásticas. Como lo anota Kmenta:
Así, la no consideración o la exclusión del supuesto de que X es no estocástica y su reemplazo por el supuesto de que X es estocástica aunque independientemente de [u] no cambia las propiedades deseables y la factibilidad de la estimación de mínimos cuadrados.
Por consiguiente, se conservarán el supuesto 2 o el supuesto 6 hasta que se vuelva a tratar con los modelos de ecuaciones simultáneas en la parte IV.
martes, 26 de agosto de 2014
Supuesto 1: Modelo de regresión lineal en los parámetros
lunes, 25 de agosto de 2014
Violación de los supuestos del modelo clásico (III)
Desafortunadamente, no se pueden dar respuestas satisfactorias a todas estas preguntas. Lo que se hará en lo que resta de la parte II es mirar algunos de los supuestos en forma más crítica, aunque no todos serán objeto de un escrutinio completo. En particular, no se analizarán a fondo los supuestos 1,2,3,6 y 11 .. por las siguientes razones.
domingo, 24 de agosto de 2014
Violación de los supuestos del modelo clásico (II)
Antes de proseguir, se observa que la mayoría de los libros de texto enumeran menos de 11 supuestos. Por ejemplo, los supuestos 7 y 8 se dan por cumplidos en lugar de expresarlos explícitamente. Se decidió hacerlos explícitos pues parece razonable distinguir entre los supuestos requeridos para que los MCO tengan las propiedades estadísticas deseables (como es la de MELI) y las condiciones requeridas para que los MCO sean útiles. Por ejemplo, los estimadores MCO son estimadores MELI aun si el supuesto 8 no satisface. Pero en ese caso los errores estándar de los esitmadores MCO serán grandes comparativamente frente a sus coeficientes (es decir, razones y pequeñas), con lo cual se hace difícil evaluar la contribución de un o más regresores a la suma explicada de cuadrado.
Como lo menciona Wetherill, en la práctica surgen dos tipos de problemas grandes al aplicar el modelo clásico de regresión lineal: (1) aquellos debidos a supuestos sobre la especificación del modelo y sobre las perturbaciones ui y (2) aquellos debidos a los supuestos sobre la información. En la primera categoría están los supuestos 1,2,3,4,5,9 y 11. Aquellos en la segunda categoría incluyen los supuestos 6,7,8 y 10. Adicionalmente, los problemas de información, tales como las observaciones atípicas (o inusuales) y los errores de medición en la información también se encuentran en la segunda categoría.
Con respecto a problemas que surgen debido a los supuestos sobre las perturbaciones y las especificaciones del modelo, aparecen tres grandes interrogantes: (1) Qué tan severo es el alejarse de un supuesto particular para que este realmetne importante? Por ejemplo, si las ui no siguen exactamente una distribución exactamente normal, qué nivel de alejamiento de este supuesto se puede aceptar sin que se destruya la propiedad MELI de los estimadores MCO? (2) Cómo averiguar si un supuesto particular ha sido realmente violado en un caso concreto? Así, cómo se verifica si las perturbaciones están normalmente distribuidas en una aplicación dada? Ya se han estudiado las pruebas de normalidad ji cuadrado y de Jarque-Bera (3) Qué medidas remediales se pueden adoptar si uno o más supuestos son falsos? Por ejemplo, si se encuentra que el supuesto de homoscedasticidad en una aplicación es falso, qué se hace entonces?
sábado, 23 de agosto de 2014
Violación de los supuestos del modelo clásico (I)
Supuesto 1. El modelo de regresión es lineal en los parámetros
Supuesto 2. Los valores de los regresores, las X, son fijos en muestreo repetido.
Supuesto 3. Para X dadas, el valor medio de la perturbación ui es cero.
Supuesto 4. Para X dadas, la varianza ui es constante u homoscedástica.
Supuesto 5. Para X dadas, no hay autocorrelación en las perturbaciones
Supuesto 6. Si las X son estocásticas en término de perturbación y las X ( estocásticas) son independientes o, al menos, no están correlacionadas.
Supuesto 7. El número de observaciones debe ser mayor que el número de regresores
Supuesto 8. Debe haber suficiente variabilidad en los valores que toman los regresores.
Supuesto 9. El modelo de regresión está correctamente especificado
Supuesto 10. No hay relación lineal exacta (es decir no ha multicolinealidad) en los regresores.
Supuesto 11. El término estocástico (de perturbación) ui está normalmente distribuido.
viernes, 22 de agosto de 2014


jueves, 21 de agosto de 2014


miércoles, 20 de agosto de 2014

martes, 19 de agosto de 2014

lunes, 18 de agosto de 2014

domingo, 17 de agosto de 2014
Resumen y Conclusiones Enfoque Matricial en el modelo de regresion lineal
Al concluir este capítulo obsérvese que si las variables X y Y están medidas en forma de desviaciones, es decir, como desviaciones de sus medias muestrales, hay pocos cambios en las fórmulas presentadas anterioresmente. Estos cambios se enumeran enl atabla 9.6 . Como lo muestra la sigueinte tabla, en forma de desviaciones la correción para la medida nY. se elimina de STC y de SEC. Por qué? Esta pérdida resulta de un cambio en la f'órmula para R². Por lo demás, la mayoría de las f'órmulas desarrolladas en las unidades originales de medición se mantienen para la forma de desviación.
sábado, 16 de agosto de 2014
Resumen del enfoque matricial: Un ejemplo ilustrativo (V)


viernes, 15 de agosto de 2014
Resumen del enfoque matricial: Un ejemplo ilustrativo (IV)
F = (414,072.3893/164.73797) = 2513.52
cuya distribución es igual a la distribución F con 2 y 12 g de l. El valor F calculado es, obviamente, muy significativo; se puede rechazar la hipótesis nula de que β2 = β3 = 0, es decir que, el gasto de consumo personal per capita no está relacionado linealmente con el ingreso disponible per cápita ni con la tendencia.
jueves, 14 de agosto de 2014
Resumen del enfoque matricial: Un ejemplo ilustrativo (III)
Volviendo a la significancia estadística de los coeficientes estimados, a partir de (9.10.14) se observa que cada uno de los coeficientes estimados es estadísticamente significativo individualmente, a un nivel de significancia del 5% por ejemplo: Las razones entre los coeficientes estimados y sus errores estándar (es decir, las razones t) son 3.83421, 15.61077 y 2.69598, respectivamente. Utilizando una prueba t de dos colas al nivel de significancia del 5%, se observa que el valor t crítico para 12 g de l es 2.179. Cada uno de los valores t calculados excede este valor crítico. Por tanto, a nivel individual, se puede rechazar l ahipótesis nula de que el verdadero valor poblacional del coeficiente relevante es cero.
Como se anotó anteriormente, no es posible aplicar la prueba t usual para verificar la hipótesis de que β2 = β3 = 0 simultaneamente, porque el procedimiento de prueba t supone que se toma una muestra independiente cada vez que se aplica una prueba t. Si se utiliza la misma muestra para probar la hipótesis sobre β2 y β3 simultáneamente, es probable que los estimadores β2 y β3 estén correlacionados, violando así el supuesto en el cual se basa el procedimiento de la prueba t^9. En realidad, la matriz de varianza-covarianza de β dada en (9.10.9) muestra que los estimadores β2 y β3 están correlacionados negativamente (la covarianza entre las dos es -0.13705). Por tanto, no se utiliza la prueba t para probar la hipótesis nula de que β2 = β3 = 0.
miércoles, 13 de agosto de 2014
Resumen del enfoque matricial: Un ejemplo ilustrativo (II)


martes, 12 de agosto de 2014
Resumen del enfoque matricial: Un ejemplo ilustrativo (I)

lunes, 11 de agosto de 2014
Varianza de la predicción individual

domingo, 10 de agosto de 2014


sábado, 9 de agosto de 2014
Predicción individual

viernes, 8 de agosto de 2014
jueves, 7 de agosto de 2014
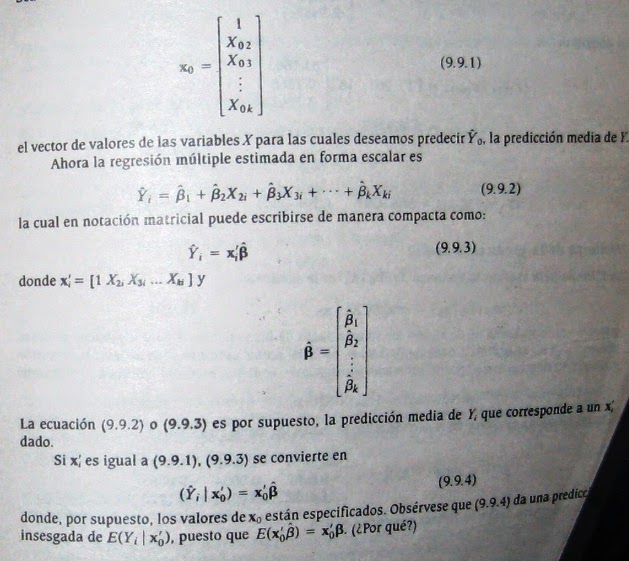
Predicción utilizando regresión múltiple: formulación matricial
miércoles, 6 de agosto de 2014
Prueba de restricciones lineales: prueba F global utilizando notación matricial
Sea

martes, 5 de agosto de 2014
Prueba de significancia global de la regresión: Análisis de varianza en notación matricial (II)


lunes, 4 de agosto de 2014
Prueba de significancia global de la regresión: Análisis de varianza en notación matricial (I)
Suponiendo que las perturbaciones ui están normalmente distribuidas y la hipótesis nula es β2 = β3 = .......βk = 0, y de acuerdo con el capítulo 8, se puede demostrar que

domingo, 3 de agosto de 2014
Prueba de hipótesis sobre coeficientes individuales de Regresión en notación matricial (II)

Por consiguiente, la distribución t puede ser utilizada para probar hipótesis sobre el verdadero βi y para establecer intervalos de confianza sobre éste. El verdadero mecanismo ya ha sido ilustrado en los capítulos 5 y 8. Para un ejemplo completo.
sábado, 2 de agosto de 2014
Prueba de hipótesis sobre coeficientes individuales de Regresión en notación matricial (I)
u ~ N(0,σ²I) (9.6.1)
donde u y 0 son vectores de las columnas nx1 e I es una matriz identidad (nxn), siendo 0 el vector nulo.
Dado el supuestos de normalidad, sabemos que en los modelos de regresión lineal de dos y tres variables (1) los estimadores MCO, βi, y MV, βi son idétnticos, pero el estimador MV σ² es sesgado, aun cuando este sesgo puede eliminarse utilizando el estimador MCO insesgado σ²; y (2) los estimadores MCO βi también están normalmente distribuidos. Generalizando, en el caso de k variables podemos demostrar que:

Es decir, cada elemento de β está normalmente distribuido con media igual al elemento correspondiente el verdadero β y la varianza está dada por σ² veces el elemento correspondiente de la diagonal de la matriz inversa (X'X)^-1
viernes, 1 de agosto de 2014
Matriz de correlación
donde el subíndice 1, al igual que antes, denota la variable dependiente Y (r12 significa el coeficiente de correlación entre Y y X2, y así suscesivamente) y donde se hace uso del hecho de que el coeficiente de correlación de una variable con respecto a ella misma es siempre 1 (r11 = r22 = ..... =rkk =1).
A partir de la matriz de correlación R se pueden obtener los coeficientes de correlación de primer orden (véase capítulo 7) y de órdenes superiores tales como r12.34,.....k. (Véase ejercicio 9.4). Muchos programas de computador calculan bajo rutina la matriz R. Se estudiará la matriz de correlación en nuestro trabajo futuro.
